|
|

|
Space History for November 17
If you are not already a subscriber, you are welcome to enter your email address here to sign up to receive the Space History newsletter on a daily basis. Under no circumstances will we release your legitimate email address entered here to outside persons or organizations, and it will only be used for mailing the specific information you have requested.
| Enter your email address here: |
Unsubscribe instructions are included in every newsletter issue in case you decide you no longer wish to receive it.
Note: We record the IP address from which subscriptions are entered to help prevent SPAM abuses.
Race To Space
Someone will win the prize...
... but at what cost?
Visit RaceToSpaceProject.com
to find out more!
1790
Born, August Ferdinand Moebius, German mathematician, astronomer (Moebius strip)
ref: en.wikipedia.org
1865
Born, John S. Plaskett, Canadian astronomer (Plaskett's twins)
John Stanley Plaskett (17 November 1865 - 17 October 1941) was a Canadian astronomer most famous for discovering "Plaskett's twins" is a binary star.
When his father died when he was 16, he quit high school to help tend the family farm. Later, working as a mechanic, he was hired as a mechanic and handy-man by the University of Toronto's physics department. There his curiosity was ignited, and at the age of 30 he enrolled as a student, graduating in 1899. He was hired at Ottawa's Dominion Observatory in 1903 (as a mechanic) but was promoted to astronomer in 1905, beginning his career at the age of 40.
In 1922 he discovered Plaskett's star (or Plaskett's twins), previously thought to be a single star, was in fact a massive binary star. He found evidence supporting Arthur Eddington's theory that interstellar matter is widely distributed throughout the Galaxy, and confirmed Jan Hendrik Oort's model of galactic rotation. He showed the stationary lines of ionized calcium in the spectra of hot stars are caused by clouds of interstellar gas. Lobbying for construction of a much larger Dominion Astrophysical Observatory in Victoria, he designed its 72-inch telescope, which was the largest telescope in the world at the time. He also conducted important work on radial velocities, the spectra of O- and B-type stars, and spectroscopic binaries.
ref: en.wikipedia.org
1868
N. R. Pogson discovered asteroid #107 Camilla.
1907
Born, Albin Wittmann, US German Rocket Team engineer after World War II, Head of Electrical Systems Analsyis Branch, Quality Division, NASA MSFC (1960), US patent 3359132 19 Dec 1967 "Method of coating circuit paths on printed circuit boards with solder"
ref: www.findagrave.com
1914
H. Thiele discovered asteroid #797 Montana.
1924
K. Reinmuth discovered asteroid #1047 Geisha.
1925
E. Buchar discovered asteroid #1055 Tynka.
1926
O. Oikawa discovered asteroids #1088 Mitaka, #1089 Tama and #1185 Nikko.
1928
A. Schaumasse discovered asteroid #1114 Lorraine.
1929
Died, Herman Hollerith, inventor (punched cards, first electric tabulating machine)
Herman Hollerith (29 February 1860 - 17 November 1929) was an American statistician and inventor who invented the first electric tabulating machine, and the punched cards used for data entry into computers. Hollerith founded a company that was amalgamated in 1911 with several other companies to form the Computing-Tabulating-Recording Company which, in 1924, was renamed to "International Business Machines" (IBM).
ref: en.wikipedia.org
1933
G. Neujmin discovered asteroid #1316 Kasan.
1936
L. Boyer discovered asteroid #1400 Tirela.
1938
K. Reinmuth discovered asteroids #1487 Boda, #1502 Arenda and #3008 Nojiri.
1944
Born, John-David Francis Bartoe (at Abington, Pennsylvania, USA), NASA astronaut (STS 51F; 7d 22.75h total time in spaceflight)

Astronaut John-David Bartoe, NASA photo
Source: Wikipedia
ref: en.wikipedia.org
1950
L. Boyer discovered asteroid #1599 Giomus.
1955
M. Laugier discovered asteroid #2393 Suzuki.
1966
The Leonids meteor shower peaked at an estimated rate of 150,000+ per hour.
ref: adsabs.harvard.edu
1967 10:32:00 GMT
NASA's Surveyor 6 fired its vernier engines for 2.5 seconds, lifted 3-4 meters off the Lunar surface, and became the first man-made object to take off from the Moon.
NASA's Surveyor 6 mission was launched on 7 November 1967. It made a soft landing on the Moon on 10 November at 0101:06 UT, at Latitude 0.46 N, Longitude 358.63 E in Sinus Medii, photographed the Lunar surface, sampled Lunar soil, and used its propulsion system to briefly lift off of the Lunar surface.
Surveyor 6 was the fourth of the Surveyor series to successfully achieve a soft landing on the Moon. The primary objectives of the Surveyor program, a series of seven robotic Lunar soft landing flights, were to support the coming crewed Apollo landings by: (1) developing and validating the technology for landing softly on the Moon; (2) providing data on the compatibility of the Apollo design with conditions encountered on the Lunar surface; and (3) adding to the scientific knowledge of the Moon. The specific primary objectives for this mission were to perform a soft landing on the Moon in the Sinus Medii region and obtain postlanding television pictures of the Lunar surface. The secondary objectives were to determine the relative abundance of the chemical elements in the Lunar soil by operation of the alpha-scattering instrument, obtain touchdown dynamics data, obtain thermal and radar reflectivity data, and conduct a vernier-engine erosion experiment.
The basic Surveyor spacecraft structure consisted of a tripod of thin-walled aluminum tubing and interconnecting braces providing mounting surfaces and attachments for the power, communications, propulsion, flight control, and payload systems. A central mast extended about one meter above the apex of the tripod. Three hinged landing legs were attached to the lower corners of the structure. The legs held shock absorbers, crushable, honeycomb aluminum blocks, and the deployment locking mechanism and terminated in footpads with crushable bottoms. The three footpads extended out 4.3 meters from the center of the Surveyor. The spacecraft was about 3 meters tall. The legs folded to fit into a nose shroud for launch.
A 0.855 square meter array of 792 solar cells was mounted on a positioner on top of the mast and generated up to 85 Watts of power which was stored in rechargeable silver-zinc batteries. Communications were achieved via a movable large planar array high gain antenna mounted near the top of the central mast to transmit television images, two omnidirectional conical antennas mounted on the ends of folding booms for uplink and downlink, two receivers and two transmitters. Thermal control was achieved by a combination of white paint, high IR-emittance thermal finish, and a polished aluminum underside. Two thermally controlled compartments, equipped with superinsulating blankets, conductive heat paths, thermal switches and small electric heaters, were mounted on the spacecraft structure. One compartment, held at 5-50 degrees C, housed the communications and power supply electronics. The other, held between -20 and 50 degrees C, housed the command and signal processing components. The TV survey camera was mounted near the top of the tripod. Strain gauges, temperature sensors, and other engineering instruments were incorporated throughout the spacecraft. One photometric target was mounted near the end of a landing leg and one on a short boom extending from the bottom of the structure.
A Sun sensor, Canopus tracker and rate gyros on three axes provided attitude knowledge. Propulsion and attitude control were provided by cold-gas (nitrogen) attitude control jets during cruise phases, three throttlable vernier rocket engines during powered phases, including the landing, and the solid-propellant retrorocket engine during terminal descent. The retrorocket was a spherical steel case mounted in the bottom center of the spacecraft. The vernier engines used monomethyl hydrazine hydrate fuel and MON-10 (90% N2O2, 10% NO) oxidizer. Each thrust chamber could produce 130-460 N of thrust on command, one engine could swivel for roll control. The fuel was stored in spherical tanks mounted to the tripod structure. For the landing sequence, an altitude marking radar initiated the firing of the main retrorocket for primary braking. After firing was complete, the retrorocket and radar were jettisoned and the doppler and altimeter radars were activated. These provided information to the autopilot which controlled the vernier propulsion system to touchdown.
With a payload virtually identical to that of Surveyor 5, this spacecraft carried a television survey camera, a small bar magnet attached to one footpad to detect magnetic material, an alpha-scattering instrument to study surface composition, and convex auxilliary mirrors mounted on the frame to view the surface under the spacecraft, as well as the necessary engineering equipment. The main differences were that Surveyor 6 had polarizing filters on the TV camera, a different type of glare hood, and had 3 auxilliary mirrors instead of 2. Surveyor 6 had a mass of 1006 kg at launch and 299.6 kg on landing.
Surveyor 6 was launched 7 November 1967 from launch complex 36B of the Eastern Test range at Cape Kennedy, Florida. The Atlas-Centaur booster put the spacecraft into an initial Earth parking orbit from which it was injected into a Lunar-transfer trajectory at 8:03:30 UT. A midcourse correction manuever was performed at 2:20:00 UT on 8 November 1967. Surveyor 6 touched down on the Lunar surface on 10 November 1967 at 01:01:06 UT (8:01:06 EST 9 November) in Sinus Medii, a flat, heavily cratered mare region, at 0.49 N, 358.60 E (selenographic), the center of the Moon's visible hemisphere.
At 10:32 UT on 17 November 1967, the vernier engines were fired for 2.5 seconds, causing Surveyor to lift off the Lunar surface 3 to 4 meters and land about 2.4 meters west of its original position. This Lunar "hop" represented the first powered takeoff from the Lunar surface, and furnished new information on the effects of firing rocket engines on the Moon, allowed viewing of the original landing site, and provided a baseline for stereoscopic viewing and photogrammetric mapping of the surrounding terrain. The mission transmitted images until a few hours after sunset on 24 November, returning a total of 29,952 images. The alpha-scattering experiment acquired 30 hours of data on the surface material.
The spacecraft was placed into hibernation for the Lunar night on 26 November. Contact with the spacecraft was resumed on 14 December for a short period, but no useful data were returned and the last transmission was received at 19:14 UT on 14 December 1967. The results of the experiments showed that the surface had a basaltic composition, similar to that found at the Surveyor 5 landing site. Engineering and soil mechanics data indicated the bearing strength of the surface was more than adequate to support human landings. This spacecraft accomplished all planned objectives. The successful completion of this mission also satisfied the Surveyor program's obligation to the Apollo project.
ref: nssdc.gsfc.nasa.gov
1968
USSR's Zond 6 returned to Earth from its Lunar flyby mission.
Zond 6 was launched 10 November 1968 on a Lunar flyby mission from a parent satellite (68-101B) in Earth parking orbit. It carried scientific probes including cosmic-ray and micrometeoroid detectors, cameras, and a biological payload, and was intended a precursor to manned missions.
Zond 6 made a midcourse correction on 12 November and flew around the Moon on 14 November 1968, at a minimum distance of 2420 km. It went behind the Moon at 05:49:37, and emerged at 06:21:11. Zond 6 took spectacular photos of the Moon's limb with the Earth in the background. 5x7 inch (12.70 by 17.78 cm) photographs of the Lunar near and far side were obtained with panchromatic (black and white) film. Some of the views allowed for stereo pictures. They were taken from distances ranging from approximately 11,000 km to 3300 km.
On the return leg, on 14 November, the hydrogen peroxide temperature aboard the L1 capsule fell from +20 deg C to -2 deg C. By the following morning, it was down to -5 deg C and in danger of disassociating into oxygen and water, so the capsule's orientation thrusters would not be able to function for re-entry. A color television camera was supposed to have been included in the cabin. If it was there, it could have been turned on to warm the capsule, but Mishin had insisted to the State Commission that it be deleted. The spacecraft could also be oriented so that the Sun would shine directly over the peroxide tank and warm it, but that might damage the 100K star sensor, which was mounted right next to it. A proposal was made that an attempt be made to orient the spacecraft using the ONA gyroscope package as flywheels, but Mishin and his deputies didn't want to try anything. Also during the return flight, a gasket failed on 16 November, leading to cabin depressurization, which would have been fatal to a human crew.
In spite of the problems, the 7K-L1 made the first successful double skip trajectory, dipping into the Earth's atmosphere over Antarctica, slowing from 11 km/sec to suborbital velocity, then skipping back out into space before making a final re-entry onto Soviet territory. The landing on 17 November 1968 was only 16 km from the pad from which it had been launched toward the Moon. After the re-entry, the main parachute ejected prematurely, ripping the main canopy, leading to the capsule being destroyed on impact with the ground. One negative was recovered from the camera container, a small victory obtained over the Americans, but the criteria for a manned flight had obviously not been met. Mishin's only hope to beat the Americans was a failure or delay in the Apollo 8 flight set for December, the next Zond test was set for January.
ref: nssdc.gsfc.nasa.gov
1970
The USSR landed Luna 17/Lunokhod 1 on Mare Imbrium (Sea of Rains) on the Moon. It was the first roving remote-controlled robot to land on another world.
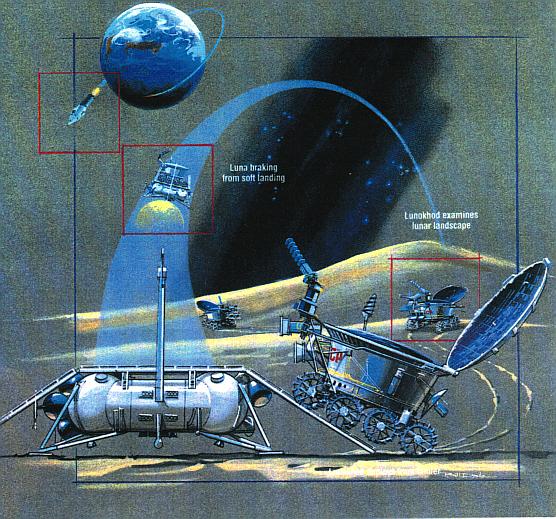
Lunokhod mission profile
Source: NSSDCA Master Catalog
Luna 17 was launched 10 November 1970 to the Moon via an Earth parking orbit, and entered Lunar orbit on 15 November 1970. It soft landed on the Moon on 17 November 1970, in the Mare Imbrium (the Sea of Rains) region. The spacecraft had dual ramps by which the payload, Lunokhod 1 (an exploratory rover with eight independently powered wheels), descended to the Lunar surface.
Lunokhod was powered by a solar cell array, and equipped with four television cameras and special extendable devices to impact the Lunar soil for soil density and mechanical property tests. An x-ray spectrometer, an x-ray telescope, cosmic-ray detectors, and a laser device were also included in the instrumentation package. The rover was intended to operate through three Lunar days but actually operated for eleven Lunar days (Earth months). The operations of Lunokhod officially ceased on 4 October 1971, the anniversary of Sputnik 1. By that time, Lunokhod had traveled 10.54 km, had transmitted more than 20,000 TV pictures, sent more than 200 TV panoramas, and had conducted more than 500 Lunar soil tests.
ref: nssdc.gsfc.nasa.gov
1981
A. Mrkos discovered asteroid #2889.
2006
NASA announced successfully testing the Mars Reconnaissance Orbiter as a communications relay: the MRO relayed signals from the rover Spirit back to Earth.
The Mars Reconnaissance Orbiter (MRO), launched 12 August 2005 on an Atlas V, was designed to orbit Mars over a full Martian year and gather data with six scientific instruments, including a high-resolution imager. The science objectives of the mission are to: characterize the present climate of Mars and its physical mechanisms of seasonal and interannual climate change; determine the nature of complex layered terrain on Mars and identify water-related landforms; search for sites showing evidence of aqueous and/or hydrothermal activity; identify and characterize sites with the highest potential for landed science and sample return by future Mars missions; and return scientific data from Mars landed craft during a relay phase. MRO was planned to return high resolution images, study surface composition, search for subsurface water, trace dust and water in the atmosphere, and monitor weather.
The launch window opened at Kennedy Space Center on 10 August 2005, with launch opportunities available until 5 September. The cruise to Mars took about seven months and included checkouts, calibrations, navigation, and three trajectory correction maneuvers (TCMs). The planned fourth TCM and possible fifth TCM were not required, saving 60 pounds (27 kg) of fuel, usable during MRO's extended mission. On 10 March 2006, MRO reached Mars and performed a Mars orbit insertion maneuver, passing under the southern hemisphere of Mars at an altitude of 370–400 km (230–250 mi) and firing its main engines for about 27 minutes. Signals that the burn had started reached Earth at 21:24 UT (4:24 PM EST) on 10 March. With 6 minutes left in the burn MRO passed behind Mars as seen from Earth. Radio communication resumed when it re-emerged about 30 minutes later.
The 1641 second orbit insertion burn slowed the spacecraft by about one km/sec, leaving it in a 400 x 35000 km polar capture orbit with a 35.5 hour period. The helium pressurization tank was colder than expected, which reduced the pressure in the fuel tank by about 21 kilopascals (3.0 psi). The reduced pressure caused the diminished engine thrust by 2%, but MRO automatically compensated by extending the burn time by 33 seconds. Shortly after insertion, the periapsis (closest approach to Mars) was 426 km (265 mi) from the surface (3,806 km (2,365 mi) from the planet's center). The apoapsis (the farthest distance from Mars) was 44,500 km (27,700 mi) from the surface (47,972 km (29,808 mi) from the planet's center).
Aerobraking was used over the next five months, from 30 March to 30 August 2006, to lower the orbit. MRO fired its thrusters twice more in September 2006 to fine-tune its final, nearly circular science orbit to approximately 250 to 316 km (155 to 196 mi) above the Martian surface (with periapsis over the south pole and apoapsis over the north pole). There are twelve sun-synchronous orbits per day so that the orbiter will always see the ground at 3:00 PM local time at the equator.
The SHARAD radar antennas were deployed on 16 September 2006. All of the scientific instruments were tested and most were turned off prior to the solar conjunction which occurred from 7 October to 6 November 2006. The "primary science phase" began after the conjunction ended.
MRO took its first high resolution image from its science orbit on 29 September 2006, resolving items as small as 90 cm (3 feet) in diameter. On 6 October, NASA released detailed pictures from the MRO of Victoria crater with the Opportunity rover on the rim above it. On 17 November 2006 NASA announced the successful test of the MRO as an orbital communications relay: Using the NASA rover Spirit as the point of origin for the transmission, the MRO acted as a relay for transmitting data back to Earth.
HiRISE continues to return images enabling discoveries regarding the geology of Mars. Among these is the banded terrain observations indicating the presence and action of liquid carbon dioxide (CO2) or water on the surface of Mars in its recent geological past. HiRISE photographed the Phoenix lander during its parachute descent to Vastitas Borealis on 25 May 2008 (sol 990). On 6 August 2012 (sol 2483) the orbiter passed over Gale crater, the landing site of the Mars Science Laboratory mission, during its EDL phase. The HiRISE camera captured an image of the Curiosity rover descending with its backshell and supersonic parachute.
On 3 March 2010, the Mars Reconnaissance Orbiter passed another significant milestone, having transmitted over 100 terabits of data back to Earth, which was more than all other interplanetary probes sent from Earth combined.
Science operations took place nominally from the end of solar conjunction in November 2006 to the start of the next solar conjunction in November 2008, roughly one Martian year. Following the nominal mission, extended science and communications relay missions have been undertaken.
In November 2006, problems began to surface with two MRO instruments: A stepping mechanism in the Mars Climate Sounder (MCS) skipped on multiple occasions, resulting in a field of view that is slightly out of position. By December normal operations of the instrument were suspended, although a mitigation strategy allows the instrument to continue making most of its intended observations. Also, an increase in noise and resulting bad pixels has been observed in several CCDs of the High Resolution Imaging Science Experiment (HiRISE). Operation of the camera with a longer warm-up time has alleviated the issue, but the cause is still unknown and the problem may return. The orbiter continued to experience recurring problems in 2009, including four spontaneous resets, culminating in a four-month shut-down of the spacecraft from August to December. While engineers did not determine the cause of the recurrent resets, they have created new software to help troubleshoot the problem should it recur.
The Mars Reconnaissance Orbiter consists of a main bus, constructed of titanium, carbon composites, and aluminum honeycomb. Extending from the bus are two solar panel wings and a 3 meter high-gain antenna dish. The bus houses the propulsion system, telecommunications, command, guidance, and science instruments. The maximum spacecraft mass was 2180 kg, including 1149 kg of propellants.
Propulsion is provided by a total of 20 thrusters. Six 170N monopropellant (hydrazine) main-engine thrusters were used for the Mars Orbit insertion burn, which used about 70% of the total fuel onboard. Six 22N thrusters are used for trajectory correction maneuvers and eight 0.9N thrusters for pointing. All thrusters are fed from a single propellant tank mounted near the center of the main bus. A pressurant tank is used to force propellant to the motors. Spacecraft control is achieved with the use of reaction wheels and reaction control system thrusters. Navigation and attitude knowledge is determined by 16 Sun sensors, two star tracker cameras, and two inertial measurement units which use accelerometers and gyroscopes.
Two way telecommunications is done via X-band at about 8000 MHz, primarily through the 3 m diameter steerable high-gain dish antenna. Two low-gain Ka-band antennas, mounted on the high-gain dish, are also available for transmission and reception. Two transponders and three TWT amplifiers allow maximum data rates of 6 megabits/sec. Power is provided by the two solar cell array wings mounted on opposite side of the bus. Each array has an area of 10 square meters and contains 3744 solar cells. The panels produce 1000 Watts at Mars which is used to run the equipment directly, and to charge two nickel-hydrogen 50 A-hr, 32-volt batteries. Thermal control is achieved by a combination of radiators, surface coatings, insulation, and heaters.
MRO's science payload includes the High Resolution Imaging Science Experiment (HiRISE), a visible stereo imaging camera; the Compact Reconnaissance Imaging Spectrometer for Mars (CRISM), a visible/near-infrared spectrometer to study the surface composition; the Mars Climate Sounder (MCS), an infrared radiometer to study the atmosphere, a shallow subsurface sounding radar (SHARAD) provided by the Italian Space Agency to search for underground water; the Context Camera (CTX), to provide wide-area views; and the Mars Color Imager (MARCI), to monitor clouds and dust storms. In addition, there are three engineering instruments aboard MRO: the Electra UHF communications and navigation package, used as a relay between the Earth and other Mars missions; the optical navigation camera, tested for possible navigational use on future planetary spacecraft; and the Ka-band telecommunications experiment package, for testing high performance Ka-band communications. Engineering accelerometer data is used to study the structure of the Martian atmosphere, and tracking of the orbiter is used to study the gravity field of Mars.
ref: en.wikipedia.org
ref: mars.jpl.nasa.gov
We are going to run out of oil!
Visit SpacePowerNow.org
to help fix the problem.
SpacePowerNow.org - For Human Survival
Please help support our efforts by shopping from our sponsors.



{kind=link}
This newsletter and its contents are Copyright © 2006-2026 by The L5 Development Group. All rights reserved. - Publication, in part or in whole, requires previous written permission. - Academic or personal-use citations must refer to http://L5Development.com as their source. Thank you for your cooperation.
Space History Department
Resources
The L5 Development Group Home Page
The L5 Development Group Keyword Access System
Space History for November 17 /
Webmaster /
Script last modified August 23, 2018 @ 6:05 am
Copyright © 2006-2026 by The L5 Development Group. All rights reserved.
Hosted by FKEinternet